


























































































- HOME

- 제품소개
- 제품솔루션
- 임베디드·안드로이드 솔루션

EMBOT-AVR/USN
-
-

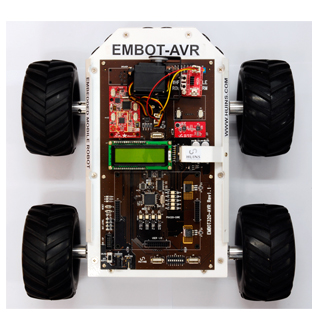
 EMBOT-AVR은 8비트 마이크로프로세서 (ATmega2560)
EMBOT-AVR은 8비트 마이크로프로세서 (ATmega2560)
기반 Wheeled Mobile Robot 플랫폼으로 Embot-VR에 탑재된
여러가지 센서를 이용하여 주변환경을 인식하며,
지능형 로봇 구현이 가능합니다. EMBOT-AVR은 Mobile Robot 제어를 위한 Firmware-API
함수를 제공하며, 제공되는 API 함수를 이용하면 빠른 시간
안에 지능형 로봇의 어플리케이션 구현이 용이합니다.
EMBOT-AVR은 하나의 로봇 플랫폼으로 다양한
로봇 응용이 가능합니다. 임베디드 Image & Color 센서가 장착되어 AVR기반에서도
Image Processing이 가능하며, 이를 응용하여 얼굴인식
및 사물인식이 가능합니다.
-

  |





















{kind=link}